
Fast Robots - Lab 10: Localization [sim]
Overview
In this lab, we implemented grid-based localization using a Bayes Filter and simulated odometry. The goal was to estimate the position of a robot moving through a known map based on noisy sensor readings and control inputs. We executed this on a discretized grid using a virtual robot simulator.
The Bayes Filter
The Bayes Filter provides a probabilistic framework for estimating a robot’s position over time using control inputs (odometry) and observations (sensor measurements). Like the Kalman Filter, the Bayes Filter maintains a belief distribution over all possible positions and continuously refines it through prediction and update steps.
Algorithm Implementation
compute_control()
To model robot motion, we decomposed movement between two poses into:
- A rotation toward the target position,
- A translation to that location,
- A final rotation to align with the desired orientation.
This function allows the filter to model motion in a structured, incremental way.
def compute_control(cur_pose, prev_pose):
""" Given the current and previous odometry poses, this function extracts
the control information based on the odometry motion model.
Args:
cur_pose ([Pose]): Current Pose
prev_pose ([Pose]): Previous Pose
Returns:
[delta_rot_1]: Rotation 1 (degrees)
[delta_trans]: Translation (meters)
[delta_rot_2]: Rotation 2 (degrees)
"""
x_cur = cur_pose[0]
y_cur = cur_pose[1]
ang_cur = cur_pose[2] * (math.pi / 180)
x_prev = prev_pose[0]
y_prev = prev_pose[1]
ang_prev = prev_pose[2] * (math.pi / 180)
r = math.sqrt((x_cur-x_prev)**2 + (y_cur-y_prev)**2)
theta = math.atan2((x_cur-x_prev), (y_cur-y_prev))
delta_rot_1 = (theta - ang_prev) * (180/math.pi)
delta_trans = r
delta_rot_2 = (ang_cur - ang_prev - delta_rot_1) * (180/math.pi)
return delta_rot_1, delta_trans, delta_rot_2
odom_motion_model()
This function computes the probability of transitioning from prev_pose to cur_pose given a control input u, using Gaussian distributions around expected motion values.
Each sub-motion is assumed to be independent, and the product of their probabilities gives the total transition likelihood.
def odom_motion_model(cur_pose, prev_pose, u):
""" Odometry Motion Model
Args:
cur_pose ([Pose]): Current Pose
prev_pose ([Pose]): Previous Pose
(rot1, trans, rot2) (float, float, float): A tuple with control data in the format
format (rot1, trans, rot2) with units (degrees, meters, degrees)
Returns:
prob [float]: Probability p(x'|x, u)
"""
#odometry readings
delta_rot_1, delta_trans, delta_rot_2 = compute_control(cur_pose, prev_pose)
delta_rot_1 = mapper.normalize_angle(delta_rot_1)
delta_rot_2 = mapper.normalize_angle(delta_rot_2)
#ideal
delta_rot_1_hat, delta_trans_hat, delta_rot_2_hat = u
delta_rot_1_hat = mapper.normalize_angle(delta_rot_1_hat)
delta_rot_2_hat = mapper.normalize_angle(delta_rot_2_hat)
#compute probs
p1 = loc.gaussian(delta_rot_1, delta_rot_1_hat, loc.odom_rot_sigma)
p2 = loc.gaussian(delta_trans, delta_trans_hat, loc.odom_trans_sigma)
p3 = loc.gaussian(delta_rot_2, delta_rot_2_hat, loc.odom_rot_sigma)
prob = p1 * p2 * p3
return prob
prediction_step()
We compute the prior belief bel_bar by looping through all potential past poses and computing the probability that the robot arrived at each new pose. For performance, we ignore states with negligible belief (e.g., < 0.0001).
This step models how motion spreads uncertainty in the belief space.
def prediction_step(cur_odom, prev_odom):
""" Prediction step of the Bayes Filter.
Update the probabilities in loc.bel_bar based on loc.bel from the previous time step and the odometry motion model.
Args:
cur_odom ([Pose]): Current Pose
prev_odom ([Pose]): Previous Pose
"""
u = compute_control(cur_odom, prev_odom)
cells_X, cells_Y, cells_A = mapper.MAX_CELLS_X, mapper.MAX_CELLS_Y, mapper.MAX_CELLS_A
temp = np.zeros((cells_X, cells_Y, cells_A))
for i in range(cells_X):
for j in range(cells_Y):
for k in range(cells_A):
if(loc.bel[i,j,k] > .0001):
for a in range(cells_X):
for b in range(cells_Y):
for c in range(cells_A):
cur_pose = mapper.from_map(a,b,c)
prev_pose = mapper.from_map (i,j,k)
prob = odom_motion_model(cur_pose, prev_pose, u)
belief = loc.bel[i,j,k]
temp += prob * belief
sum_val = np.sum(temp)
loc.bel_bar = np.true_divide(temp, sum_val) ##normalized bel_bar
sensor_model()
The sensor model computes the likelihood of receiving the current sensor reading for each possible pose by comparing it to pre-cached ground truth sensor data.
def sensor_model(obs):
""" This is the equivalent of p(z|x).
Args:
obs ([ndarray]): A 1D array consisting of the true observations for a specific robot pose in the map
Returns:
[ndarray]: Returns a 1D array of size 18 (=loc.OBS_PER_CELL) with the likelihoods of each individual sensor measurement
"""
prob_array = []
for i in range(18):
#create a gaussian distribuion for each meas
gauss = loc.gaussian(loc.obs_range_data[i], obs[i], loc.sensor_sigma)
prob_array.append(gauss)
return prob_array
update_step()
In the update step, we combine the predicted belief with sensor likelihoods to compute a new, corrected belief distribution.
The final belief is normalized and used to localize the robot on the grid.
def update_step():
""" Update step of the Bayes Filter.
Update the probabilities in loc.bel based on loc.bel_bar and the sensor model.
"""
cells_X, cells_Y, cells_A = mapper.MAX_CELLS_X, mapper.MAX_CELLS_Y, mapper.MAX_CELLS_A
for i in range(cells_X):
for j in range(cells_Y):
for k in range(cells_A):
p = sensor_model(mapper.get_views(i,j,k))
prob = np.prod(p)
loc.bel[i,j,k] = loc.bel_bar[i,j,k] * prob
loc.bel = loc.bel / np.sum(loc.bel)
Simulation Results
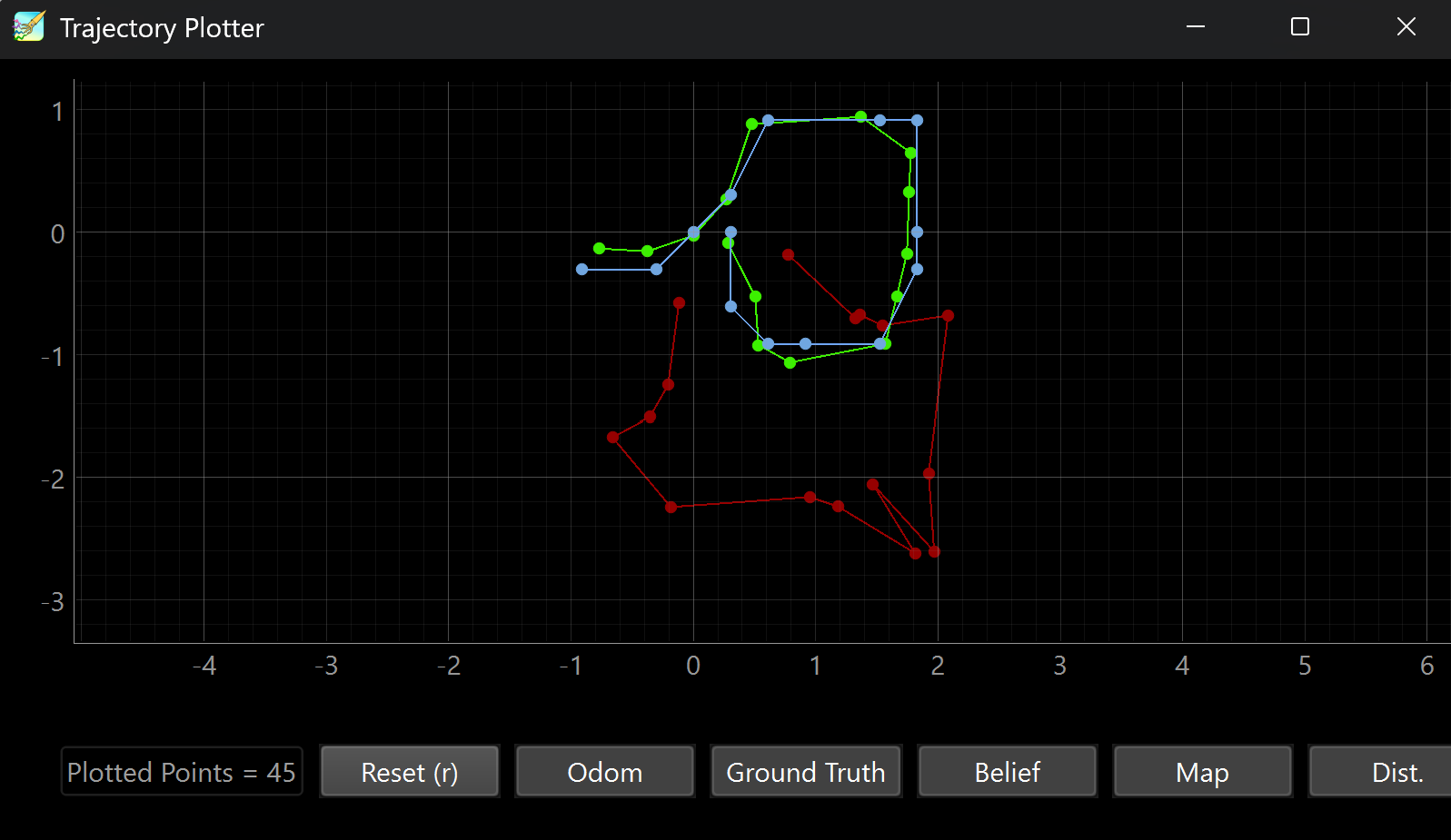
Our simulation showed that even with inaccurate odometry (red), the Bayes Filter (blue) was able to rapidly converge to the true position (green) of the robot. Despite large errors early in the trajectory, the filter corrected itself with sensor updates and achieved high accuracy.
Notably:
- Errors were highest at corners of the grid but recovered quickly.
- Raw Odom (red) is absolutely useless alone.
- The center of the map occasionally produced ambiguous results
- The belief consistently reached a confidence of
prob = 1.0at the correct grid cell.
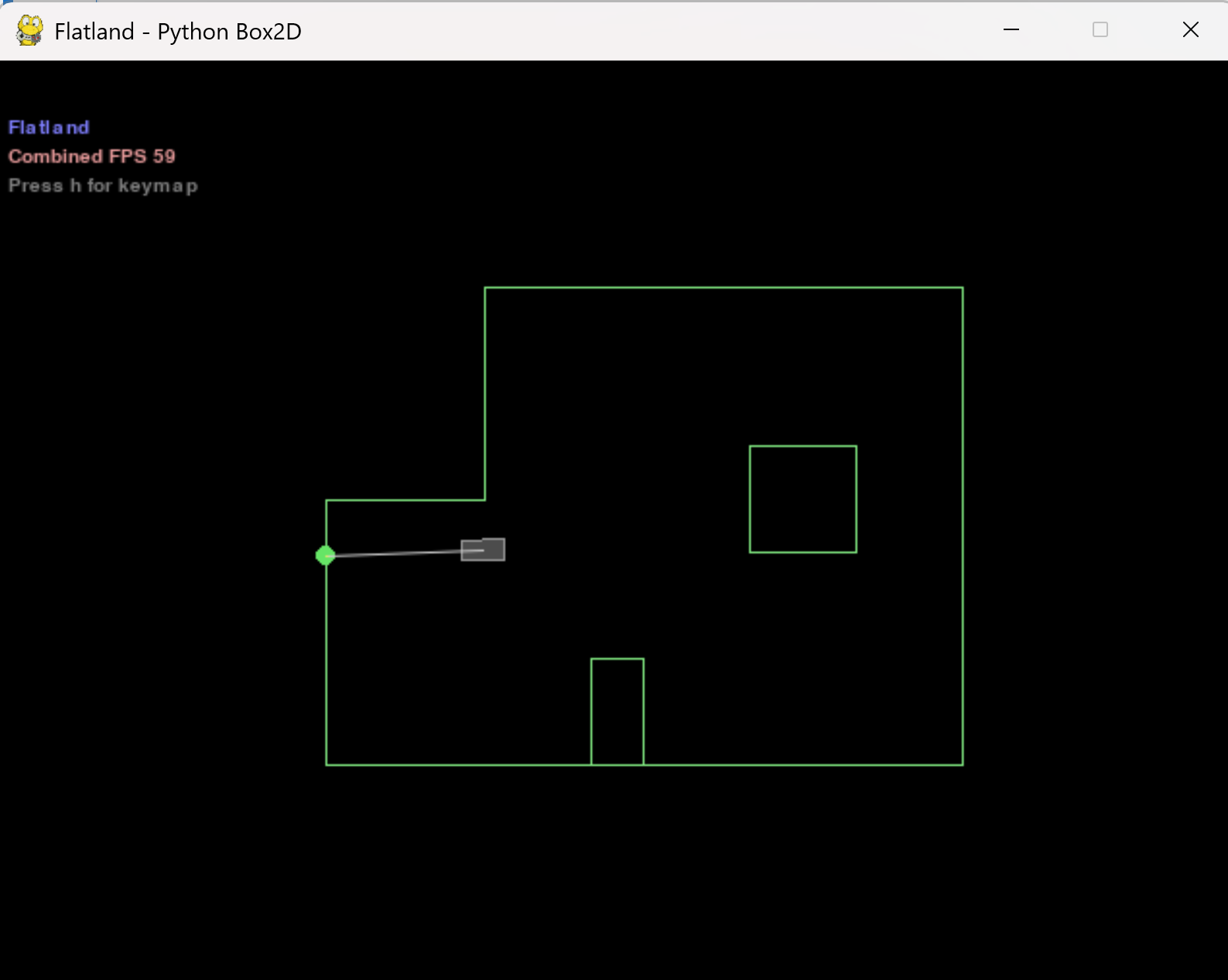
Localization Simulation
Discussion
The Bayes Filter proved highly effective for this task. Compared to the Kalman Filter, it supports non-linear motion and non-Gaussian distributions, making it more general and robust. It was particularly impressive how well the filter performed despite significant odometry drift.