
Fast Robots - Lab 2
IMU Setup and Data Analysis
Setting Up the IMU
#define SERIAL_PORT Serial
#define AD0_VAL 1 // The value of the last bit of the I2C address, on the SparkFun 9DoF IMU breakout the default is 1
#define blinkPin LED_BUILTIN
- Connected the IMU to the Artemis board using QWIIC connectors.
- Installed the “SparkFun 9DOF IMU Breakout_ICM 20948_Arduino Library”.
- Ran the example code to verify proper setup.
AD0_VAL Definition Discussion
- The default setting of 1 worked fine, as the IMU correctly responded to data requests. I tried setting the value to 0 and the IMU stopped working.
Accelerometer Data
case GET_IMU_DATA:{
tx_estring_value.clear();
Serial.println("Collect Data");
// collect data
for (int i = 0; i < cnt; i++) {
myICM.getAGMT();
pitch_a = atan2(myICM.accY(),myICM.accZ())*180/M_PI;
roll_a = atan2(myICM.accX(),myICM.accZ())*180/M_PI;
pitch_data_raw[i] = pitch_a;
roll_data_raw[i] = roll_a;
if (i == 0) {
// Low pass filter alpha deined in glob var (start at 0.2)
pitch_data[i] = pitch_a ;
roll_data[i] = roll_a ;
//last_pitch = pitch_data[i];
//last_roll = roll_data[i];
time_sample[i] = (int) millis();
delay(1000/sampling_rate);
Serial.println(i);
}
else{
// Low pass filter alpha deined in glob var (start at 0.2)
pitch_data[i] = alpha * pitch_a + (1 - alpha) * pitch_data[i-1];
roll_data[i] = alpha * roll_a + (1 - alpha) * roll_data[i-1];
//last_pitch = pitch_data[i];
//last_roll = roll_data[i];
time_sample[i] = (int) millis();
delay(1000/sampling_rate);
Serial.println(i);
}
}
//Send array
Serial.println("Send Data");
int jMax= sizeof(time_sample);
for (int j = 0; j < cnt; j++) {
tx_estring_value.clear();
tx_estring_value.append(time_sample[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(pitch_data_raw[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(pitch_data[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(roll_data_raw[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(roll_data[j]);
//tx_estring_value.append(" | ");
tx_characteristic_string.writeValue(tx_estring_value.c_str());
Serial.println(j);
//delay(10);
}
break;
}
C Code
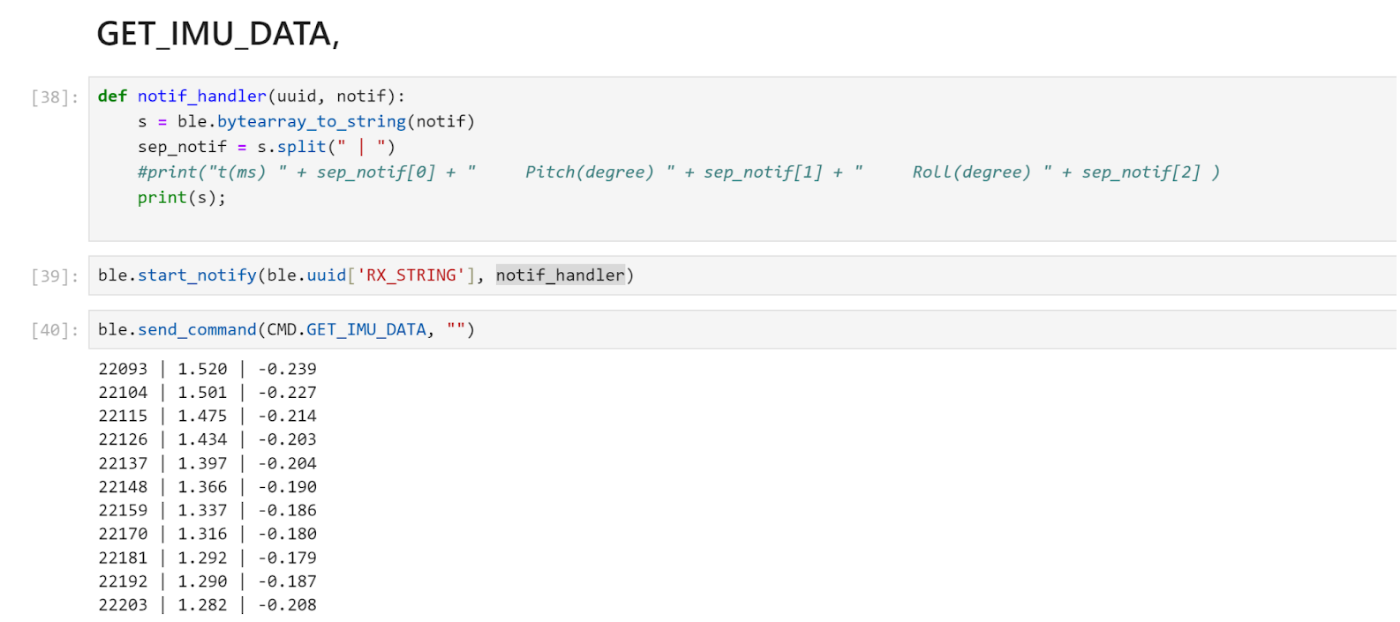
Python Code
- Calculated pitch and roll using the equations:
pitch_a = atan2(accY, accZ) * 180 / πroll_a = atan2(accX, accZ) * 180 / π
- Captured images of output at {-90, 0, 90} degrees.
Noise in Frequency Spectrum
- Conducted Fourier Transform analysis on accelerometer data.
- Determined a suitable cutoff frequency for noise filtering.
- Implemented a low-pass filter to smooth noise.
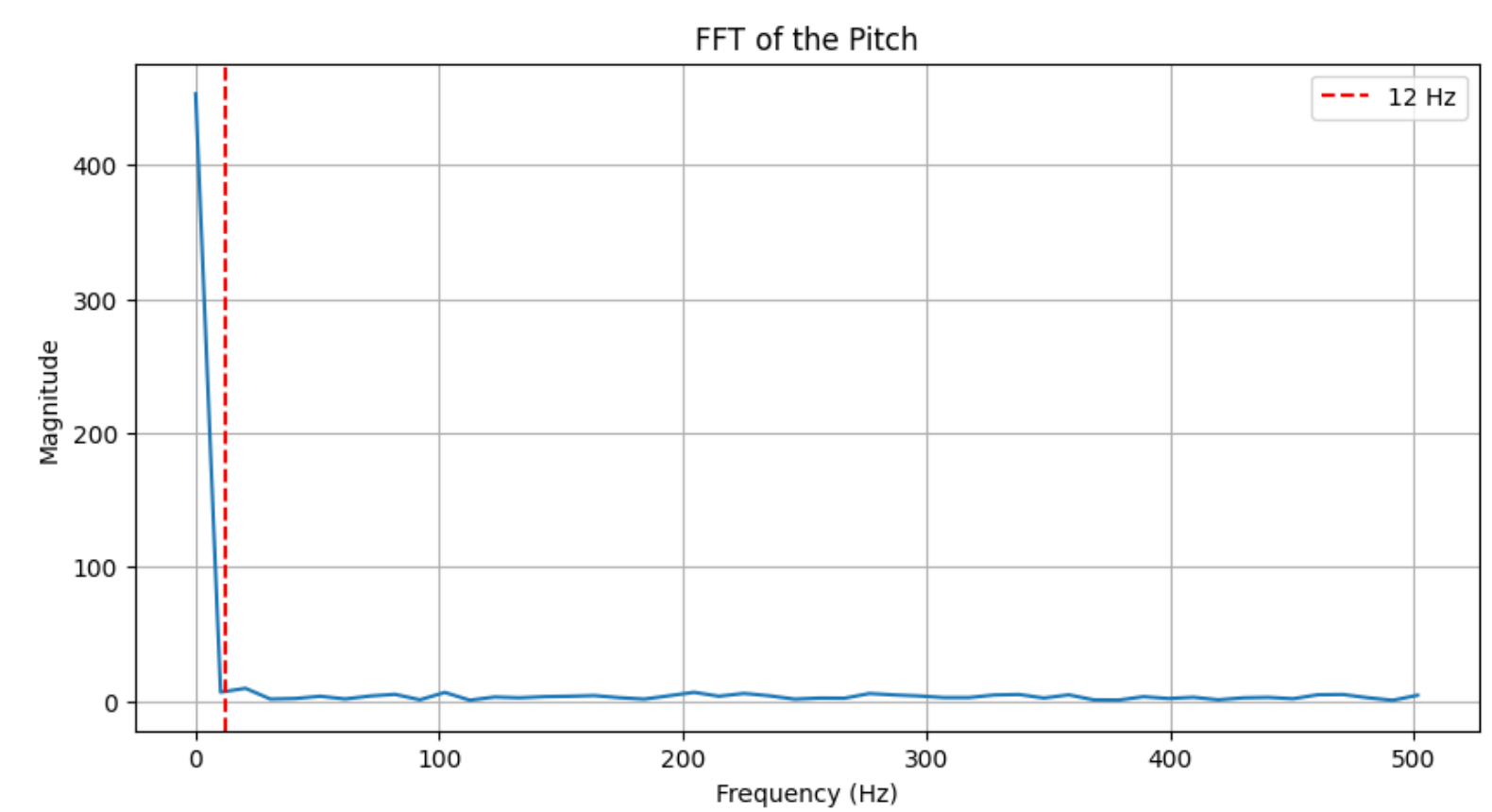 Fourier Transform Analysis
Fourier Transform Analysis
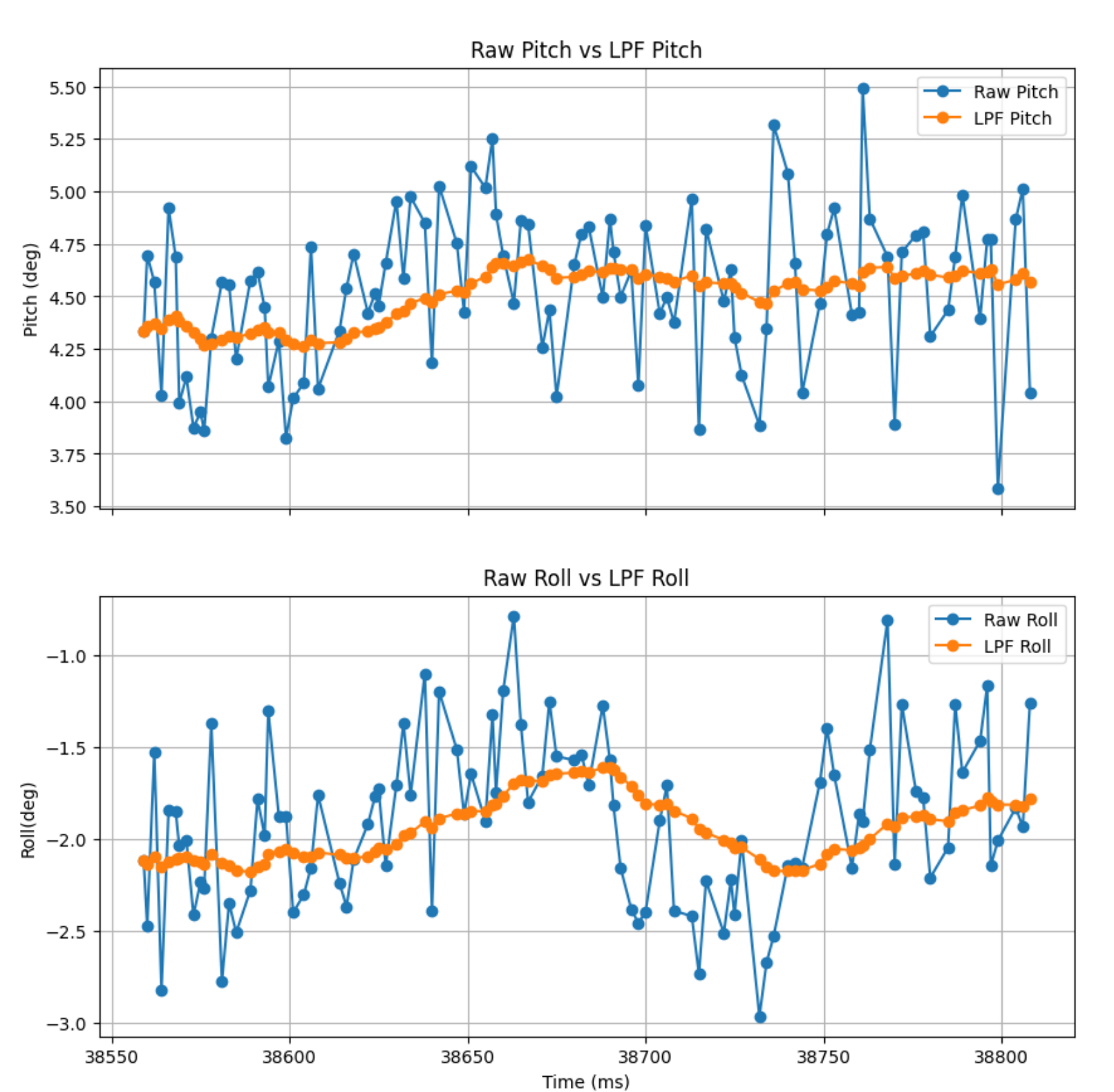
Low Pass Filter
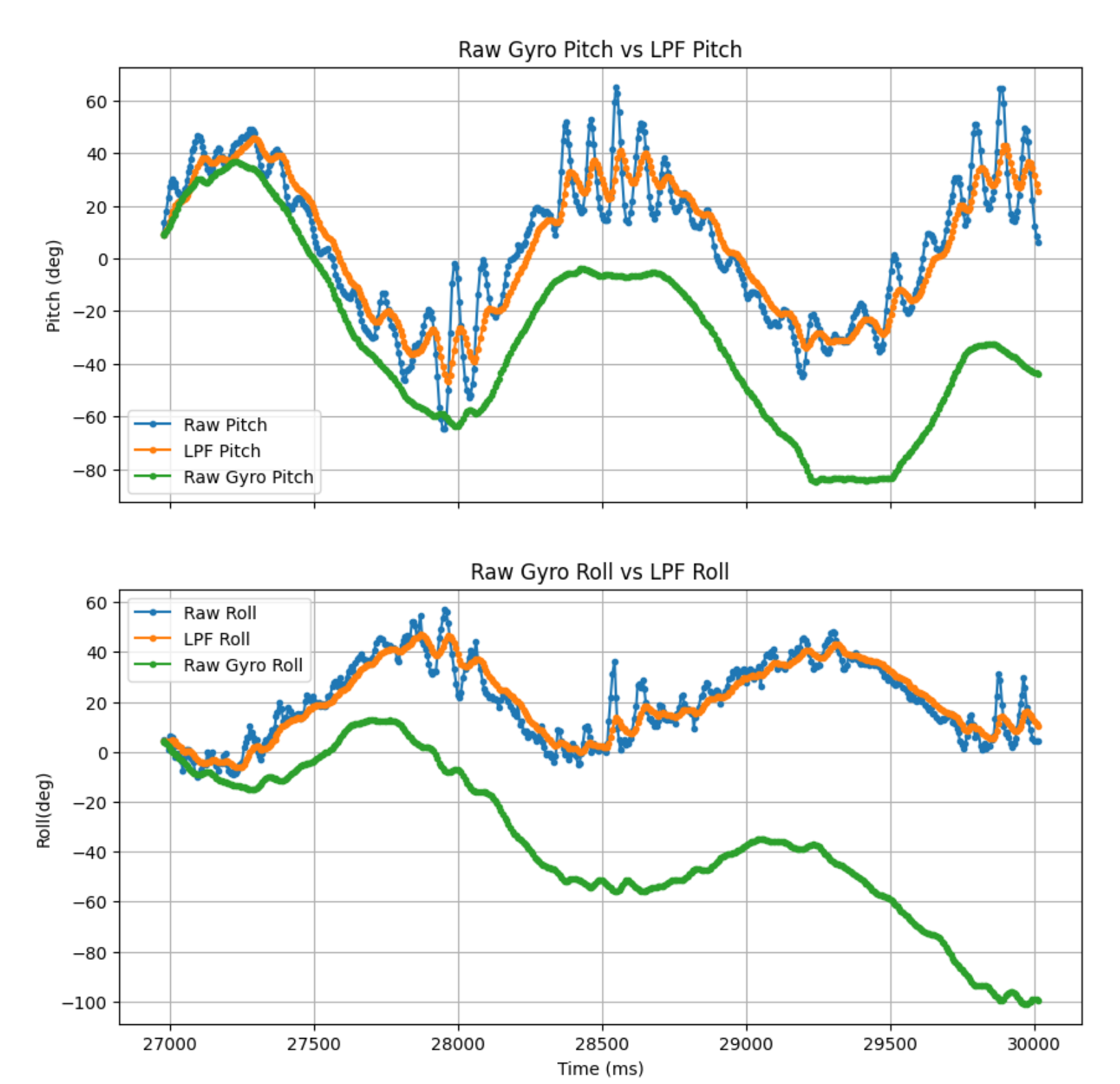
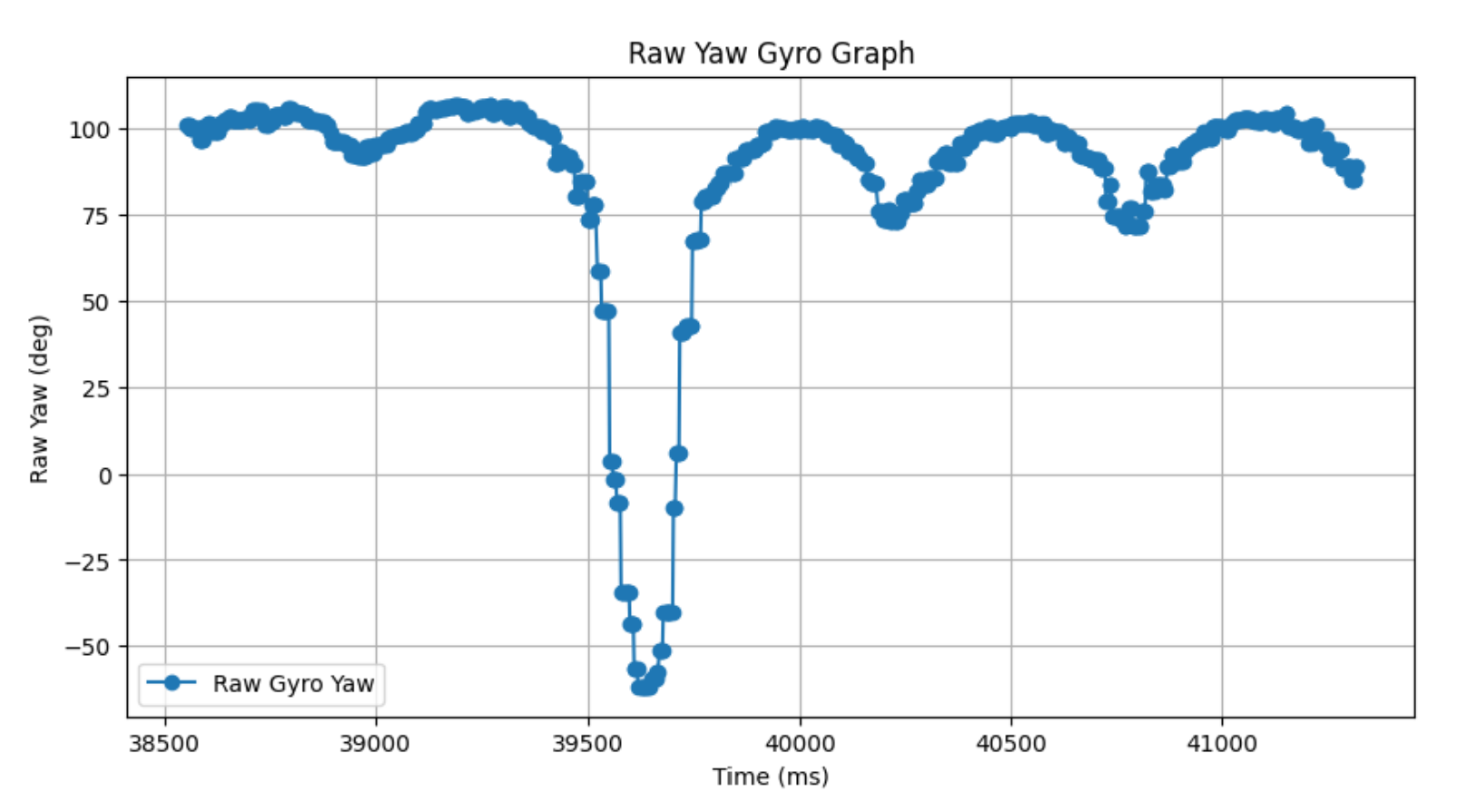
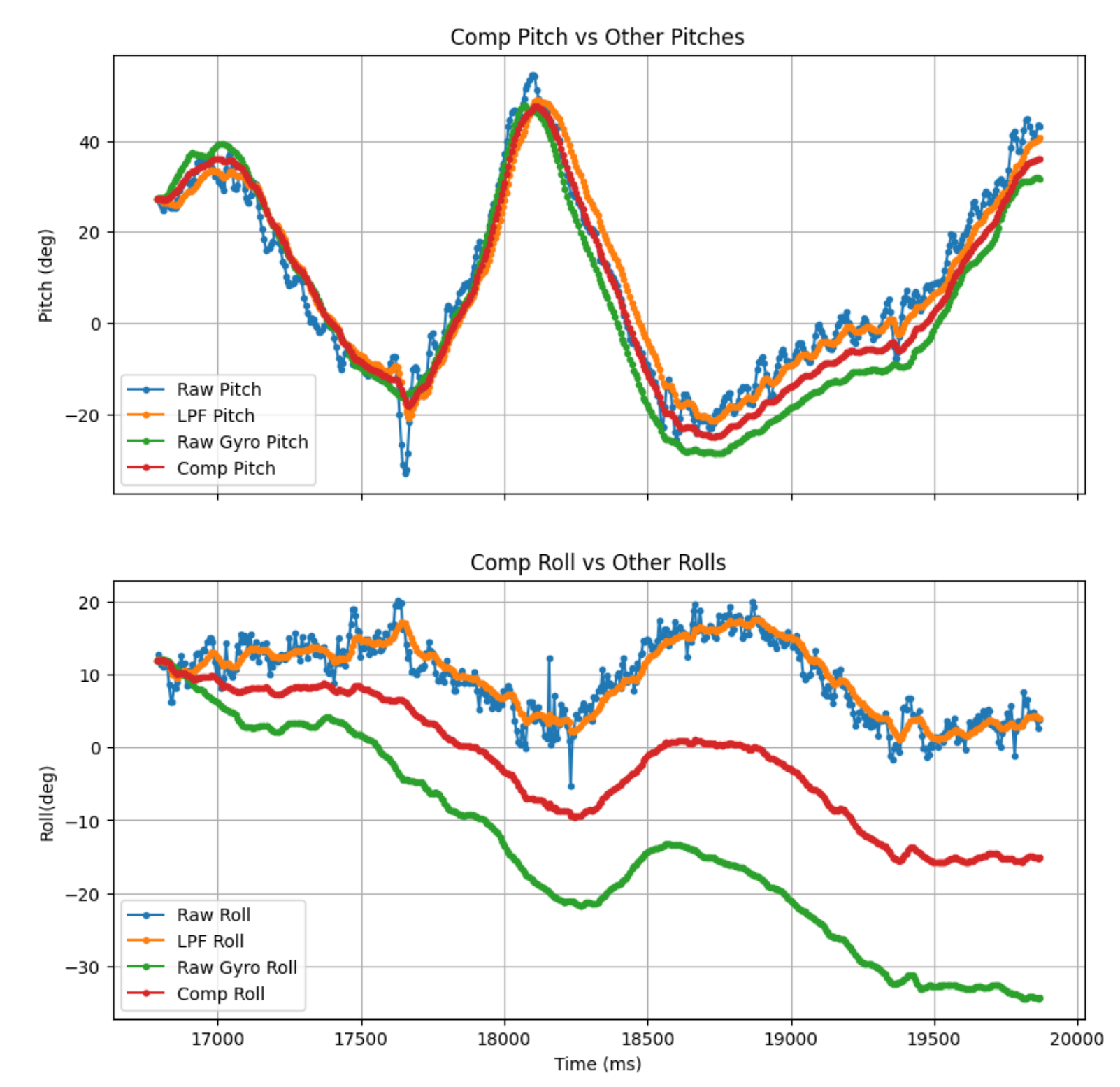
Gyroscope Data
- Measured pitch, roll, and yaw.
- Compared complementary filter output to accelerometer results.
- Evaluated drift effects and stability.
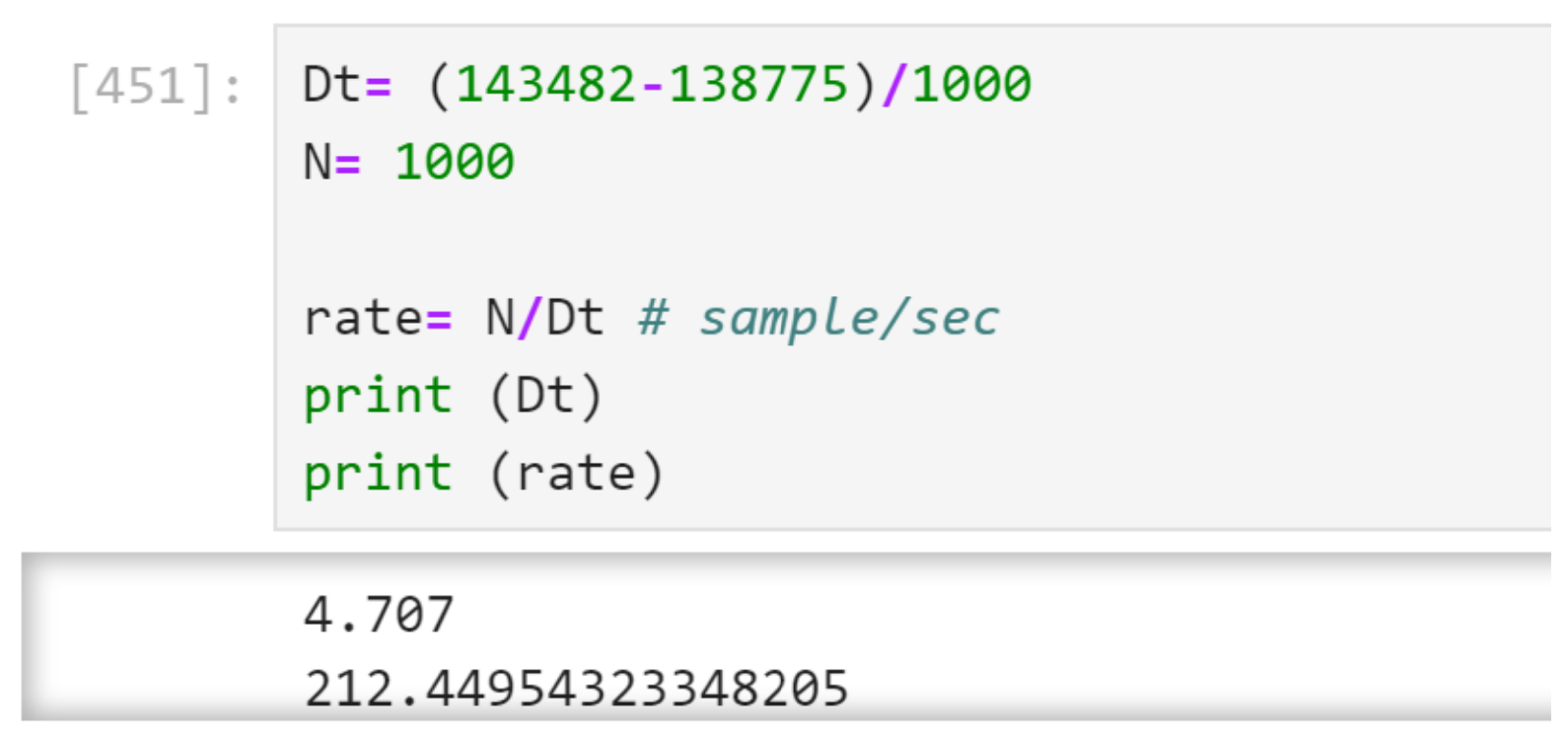
Data Transmission and Sampling
- Captured and transmitted 5 seconds of IMU data over Bluetooth.
- Optimized sampling rate by removing delays and redundant print statements.
Stunt Recording
- Recorded video of RC car movement and analyzed IMU data trends.

Tornado!
Conclusion
- Successfully set up and validated IMU functionality.
- Processed and analyzed accelerometer and gyroscope data.
- Improved data transmission efficiency and stability.
Final Code
case GET_IMU_DATA:{
tx_estring_value.clear();
float weight= 0.9;
unsigned long last_time=0;
Serial.println("Collect Data");
// collect data
for (int i = 0; i < cnt; i++) {
myICM.getAGMT();
pitch_a = atan2(myICM.accY(),myICM.accZ())*180/M_PI;
roll_a = -atan2(myICM.accX(),myICM.accZ())*180/M_PI;
pitch_data_raw[i] = pitch_a;
roll_data_raw[i] = roll_a;
dt = (millis()-last_time)/1000.;
last_time = millis();
Xm = myICM.magX();
Ym = myICM.magY();
Zm = myICM.magZ();
yaw_g = atan2(Xm,Ym)*180/M_PI;
yaw_data_raw[i] = yaw_g;
if (i == 0) {
// Low pass filter alpha deined in glob var (start at 0.07)
pitch_data[i] = pitch_a ;
roll_data[i] = roll_a ;
pitch_g = pitch_a;
roll_g = roll_a;
p= pitch_a;
r= roll_a;
pitch_data_raw_g[i] = pitch_g;
roll_data_raw_g[i] = roll_g;
time_sample[i] = (int) millis();
pitch_data_comp[i] = (1-weight)* (pitch_data_comp[i]+pitch_data_raw_g[i]) + (weight)* pitch_data[i] ;
roll_data_comp[i] = (1-weight)* (roll_data_comp[i]+roll_data_raw_g[i]) + (weight)* roll_data[i] ;
delay(1000/sampling_rate);
Serial.println(i);
}
else{
// Low pass filter alpha deined in glob var (start at 0.2)
pitch_data[i] = alpha * pitch_a + (1 - alpha) * pitch_data[i-1];
roll_data[i] = alpha * roll_a + (1 - alpha) * roll_data[i-1];
pa= alpha * pitch_a + (1 - alpha) * pitch_data[i-1];
ra= alpha * roll_a + (1 - alpha) * roll_data[i-1];
pitch_data_raw_g[i] = pitch_data_raw_g[i-1] + myICM.gyrX()*dt;
roll_data_raw_g[i] = (roll_data_raw_g[i-1] + myICM.gyrY()*dt);
p= ((p - myICM.gyrY() * dt) * 0.9) + pa * (0.1);
r= ((r + myICM.gyrX() * dt) * 0.9) + ra * (0.1);
pitch_data_comp[i] = (1-weight)* (pitch_data_raw_g[i]) + (weight)* pitch_data[i] ;
roll_data_comp[i] = (1-weight)* (roll_data_raw_g[i]) + (weight)* roll_data[i] ;
time_sample[i] = (int) millis();
delay(1000/sampling_rate);
Serial.println(i);
}
}
//Send array
Serial.println("Send Data");
int jMax= sizeof(time_sample);
for (int j = 0; j < cnt; j++) {
tx_estring_value.clear();
tx_estring_value.append(time_sample[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(pitch_data_raw[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(pitch_data[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(roll_data_raw[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(roll_data[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(pitch_data_raw_g[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(roll_data_raw_g[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(yaw_data_raw[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(pitch_data_comp[j]);
tx_estring_value.append(" | ");
tx_estring_value.append(roll_data_comp[j]);
//tx_estring_value.append(" | ");
tx_characteristic_string.writeValue(tx_estring_value.c_str());
Serial.println(j);
//delay(50);
}
break;
}