
Fast Robots - Lab 8: Stunts!
Prelab
The goal of this lab was to improve on past controllers in order to be able to perform a stunt. I chose to do the flipping stunt, utilizing the kalman filter and PID control I created last week.
Robot Alterations
In order to flip the robot successfully, I had to my existing robot setup. I didn’t have access to the traction pad in lab, so I initially tried to tape the floor or my robot, but this had poor results. Next, I tried adding various weights to the top of my robot to achieve a higher Center of Mass to make flipping easier. Eventually, removed the top shell and taped some endmills to the top of my robot and this seemed to work well!
Stunts
In this lab I used the Time of Flight and Kalman Filter code I wrote last week to collect distance information. However, I didn’t implement any of the PID control aspect since I wanted to go very fast forward, and then reverse once I reaced some distance threshold. Since the robot slips signifigantly when flipping, I tested iteratively and found a good distance threshold to be ___ for a success flip ~1ft away from the wall.
I had 5 primary states for my setup. In state 1, I drive forward at max PWM and leave for state 2 once I cross my distance threshold. In state 2 I am reversing at max PWM for 500ms to flip my car. In state 3, I set my PWM to 0 so I don’t spin out of control while I’m flipping. In state 4, I travel backwards at max PWM again for 600 ms, and then I stop driving and begin sending data in state 5.
...
if (distance < 620){
dir=1;
pwm=255;
timer0= millis();
}
else if ((timer-timer0)<500){
dir=-1;
pwm=255;
}
else if ((timer-timer0)<600){
dir=1;
pwm=0;
}
else if ((timer-timer0)<1200){
dir=-1;
pwm=255;
}
else {
driveStraight(0, 0); //stop driving
dir=1;
pwm=0;
stop=1;
}
...
Figure 1: Flip Code

Figure 2: Video for Stunt 1
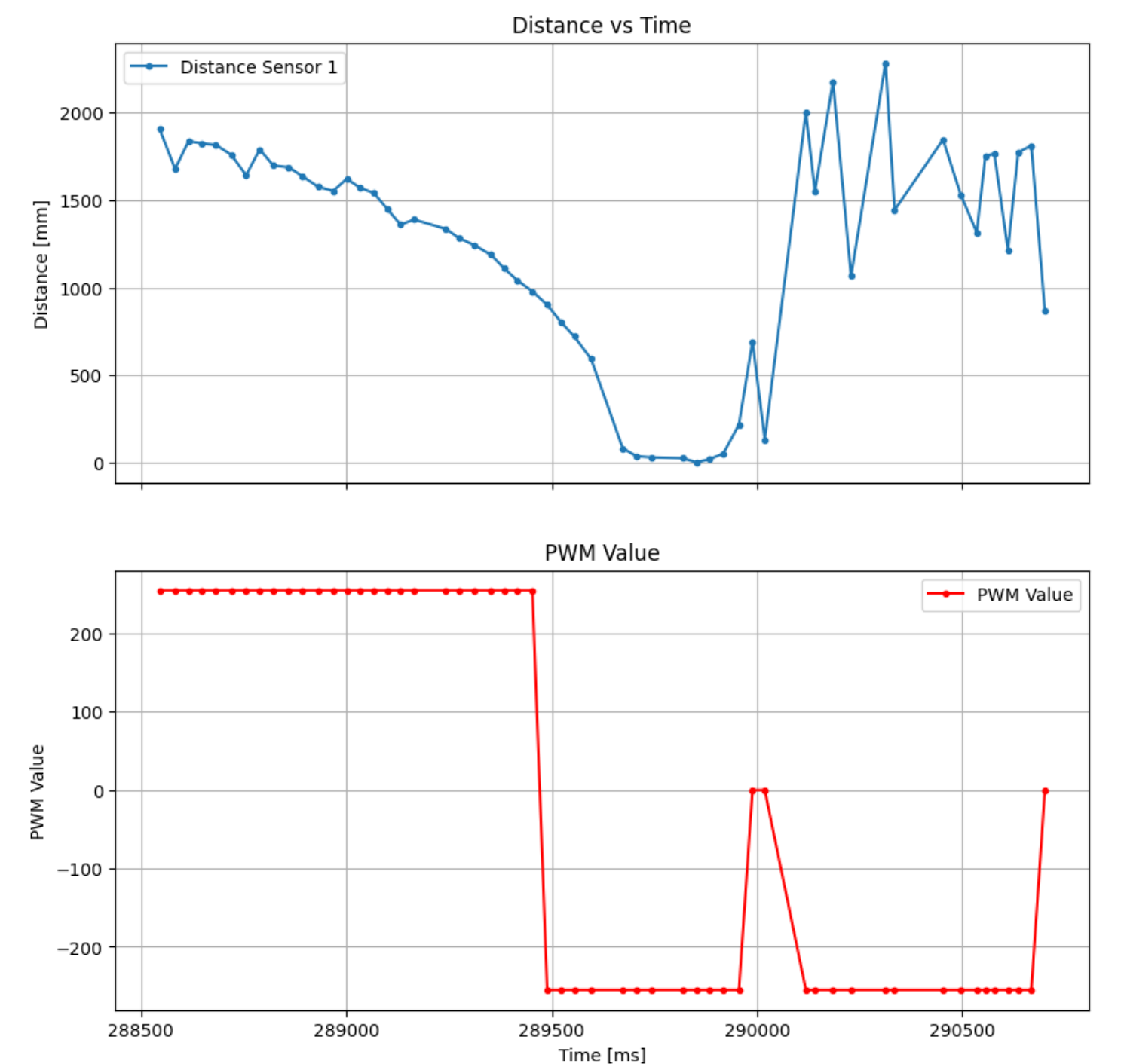
Figure 3: Distance and PWM Plots for Stunt 1
Figure 4: Video for Stunt 2
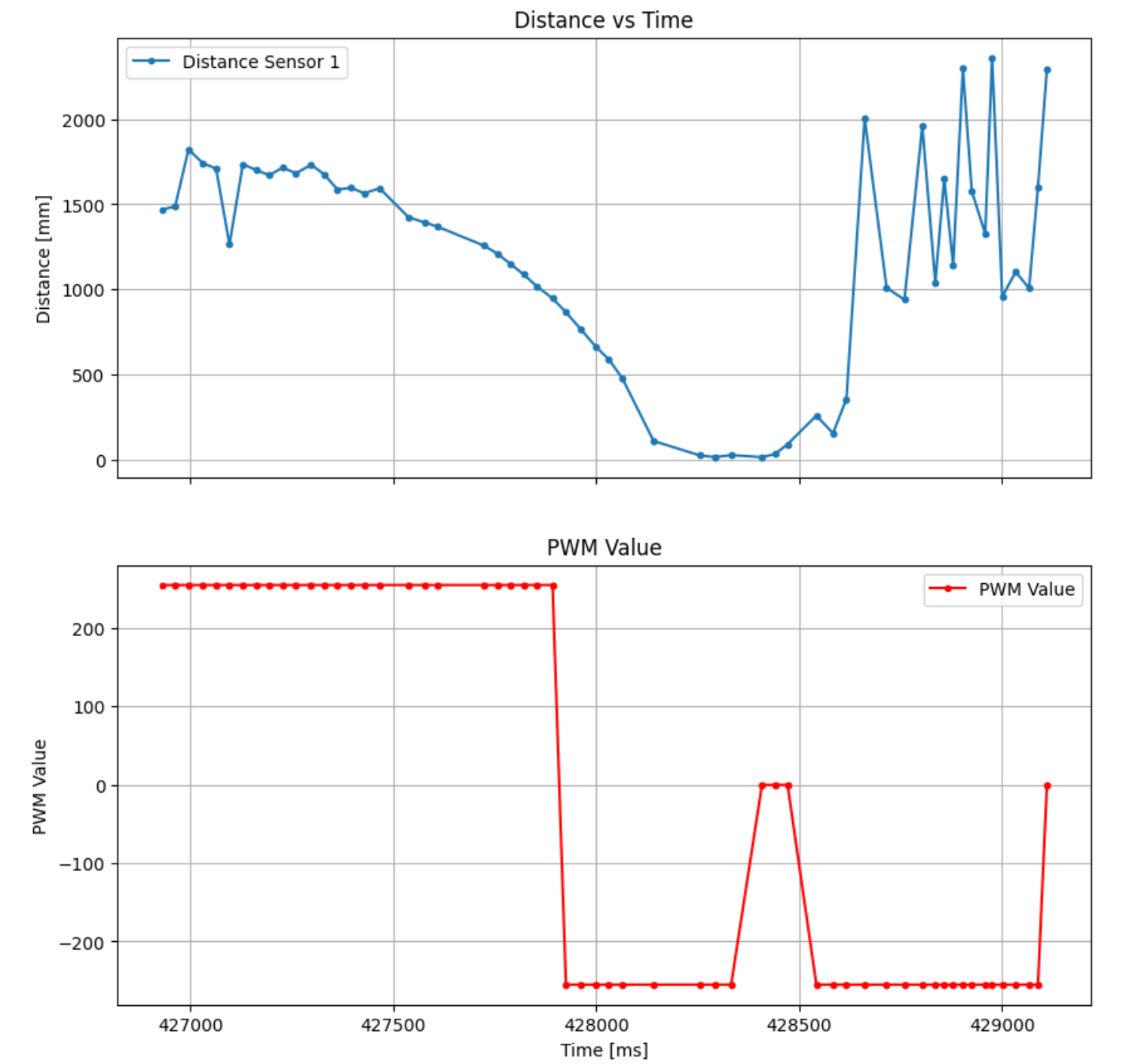
Figure 5: Distance and PWM Plots for Stunt 2

Figure 6: Video for Stunt 3
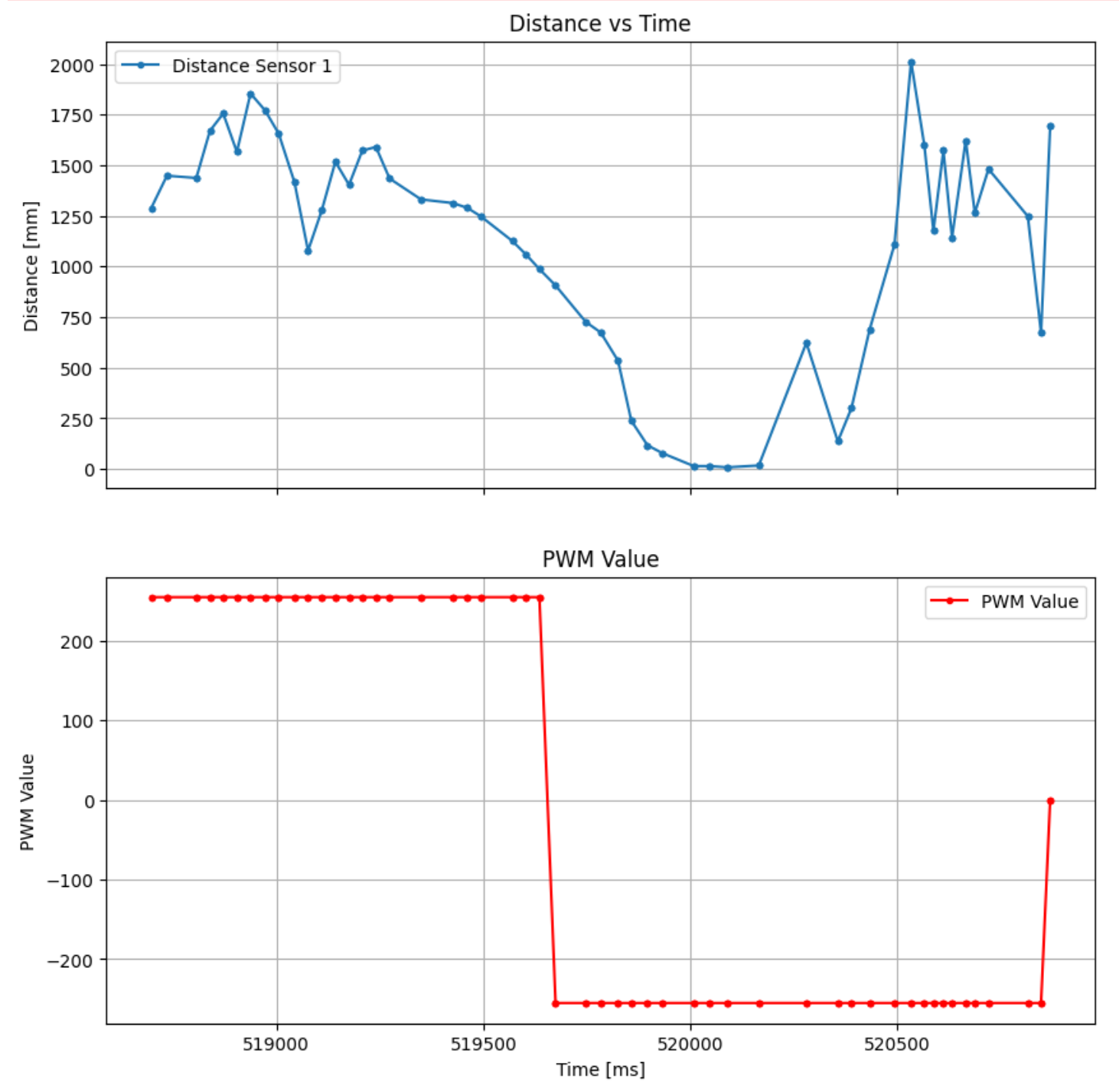
Figure 7: Distance and PWM Plots for Stunt 3
Discussion
Overall, this lab was pretty fun. Everything worked well and I spent signifigantly less time debugging than previous labs which was nice!