MAE 5190: Fast Robots
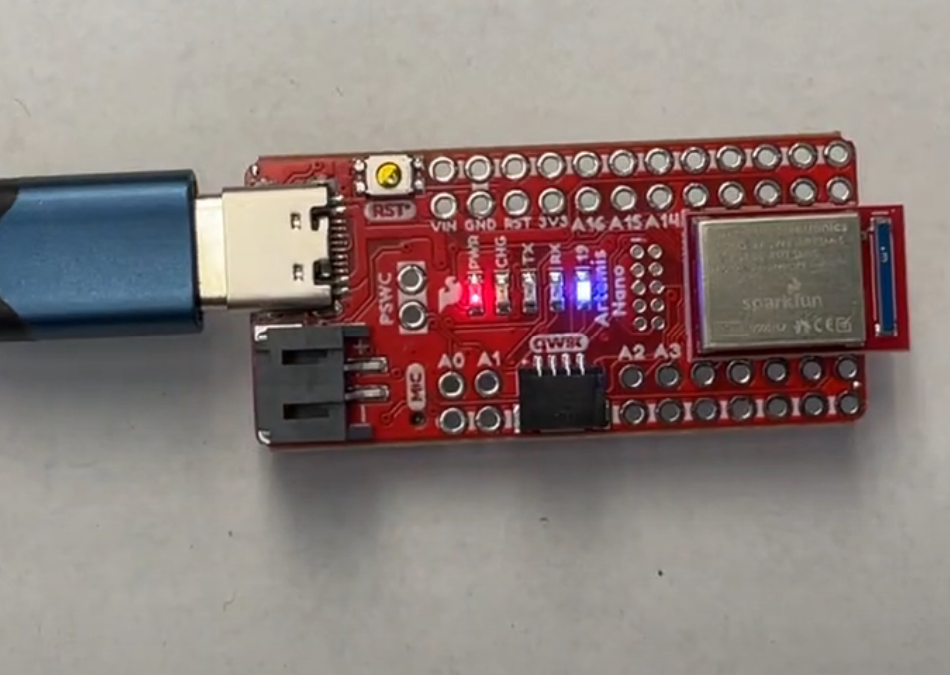
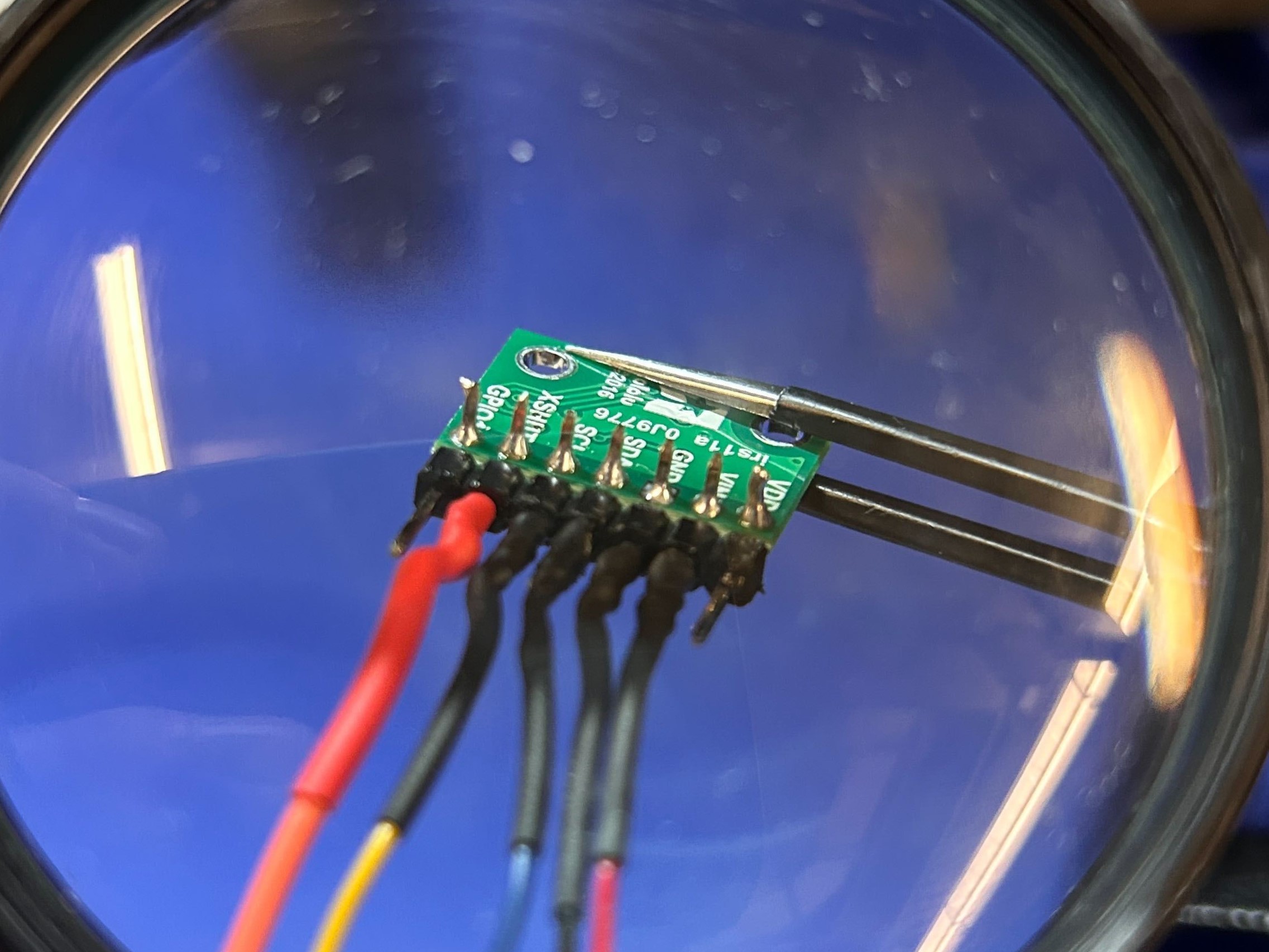
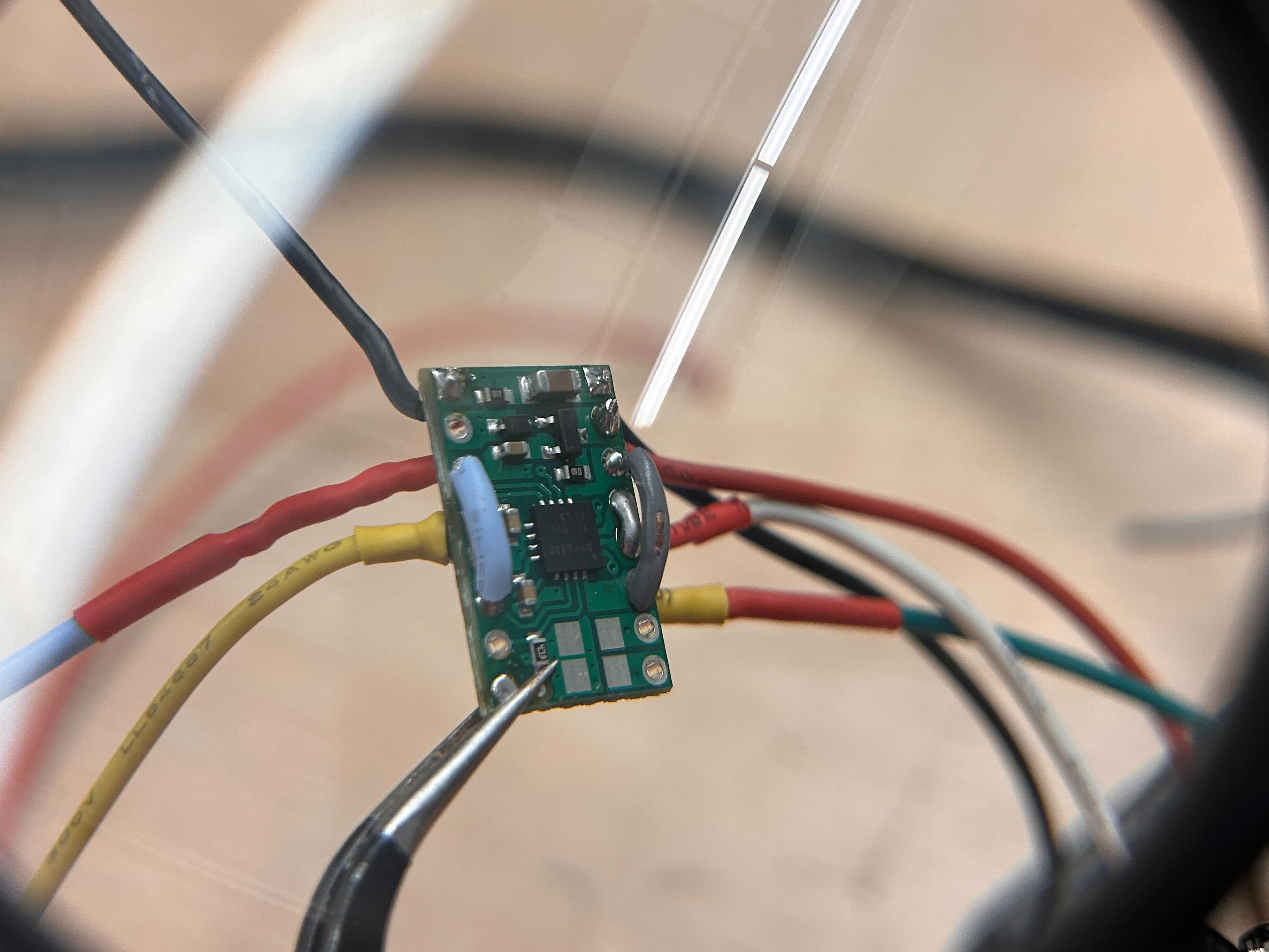
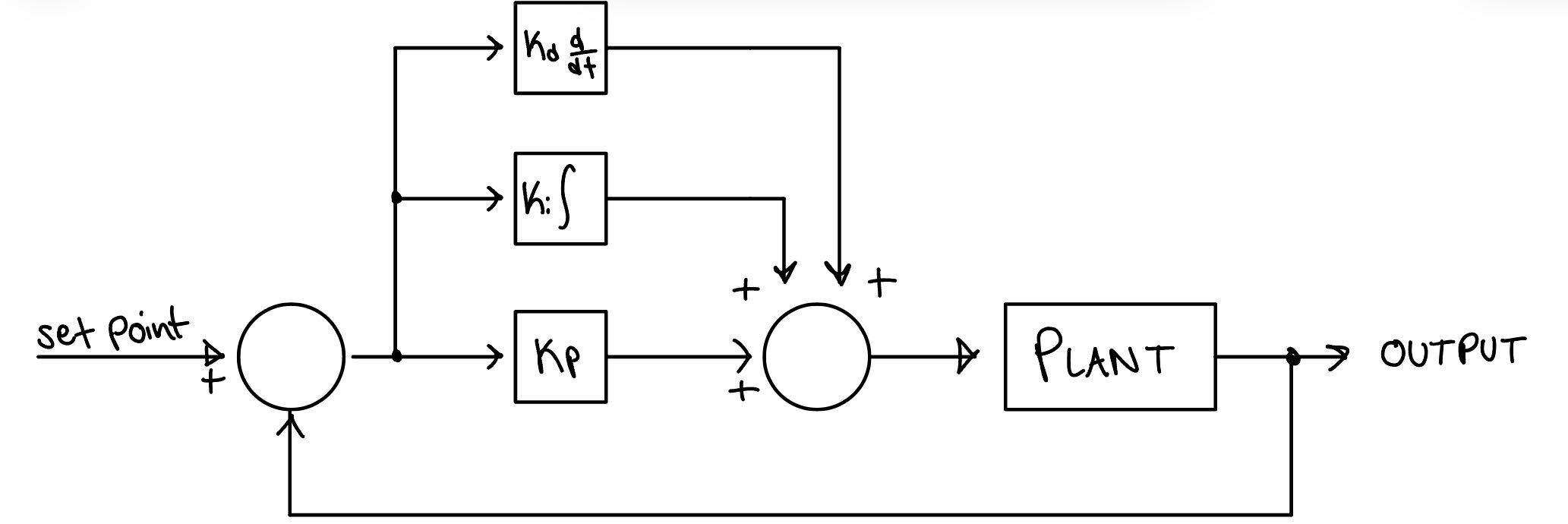
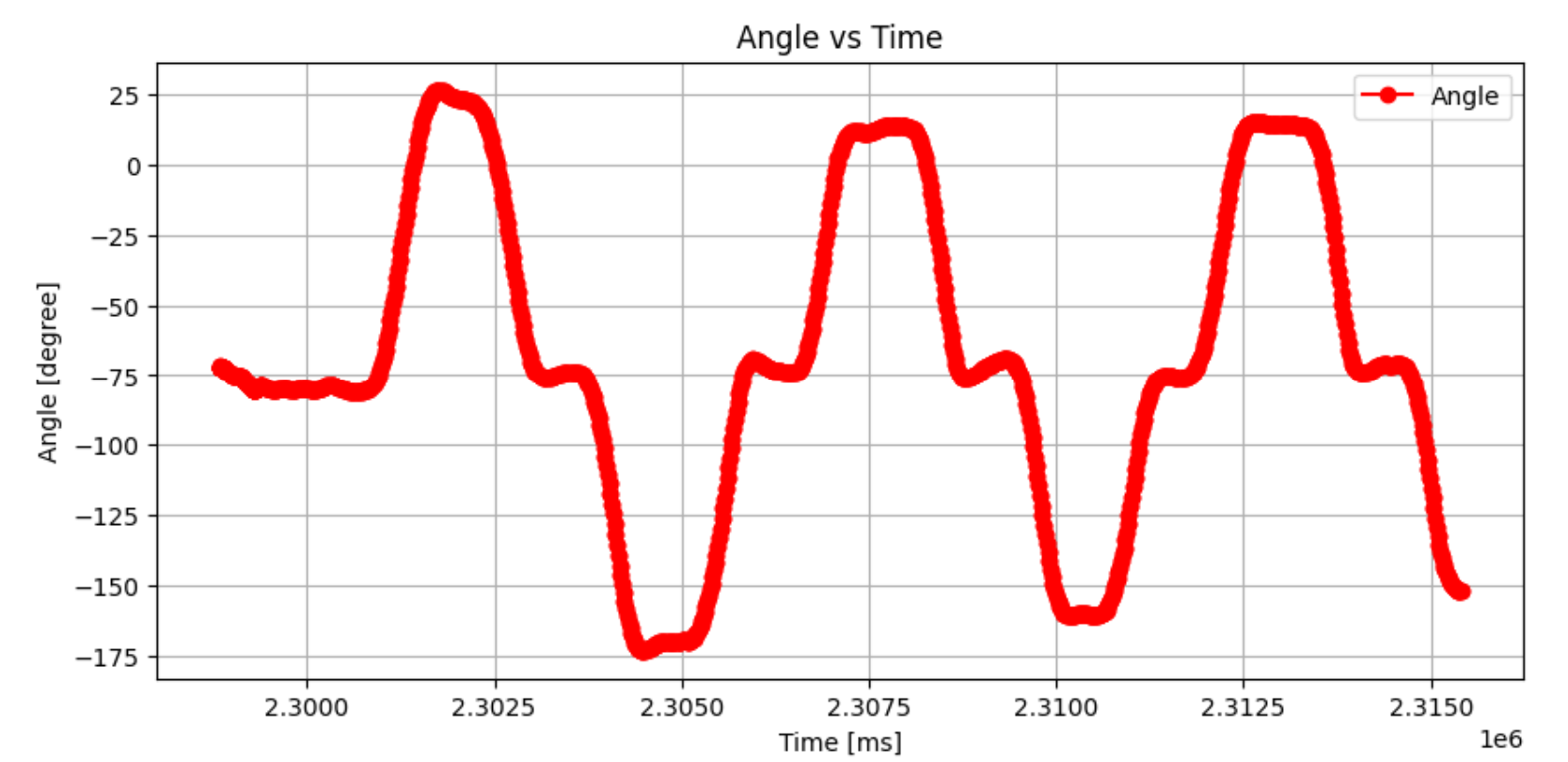
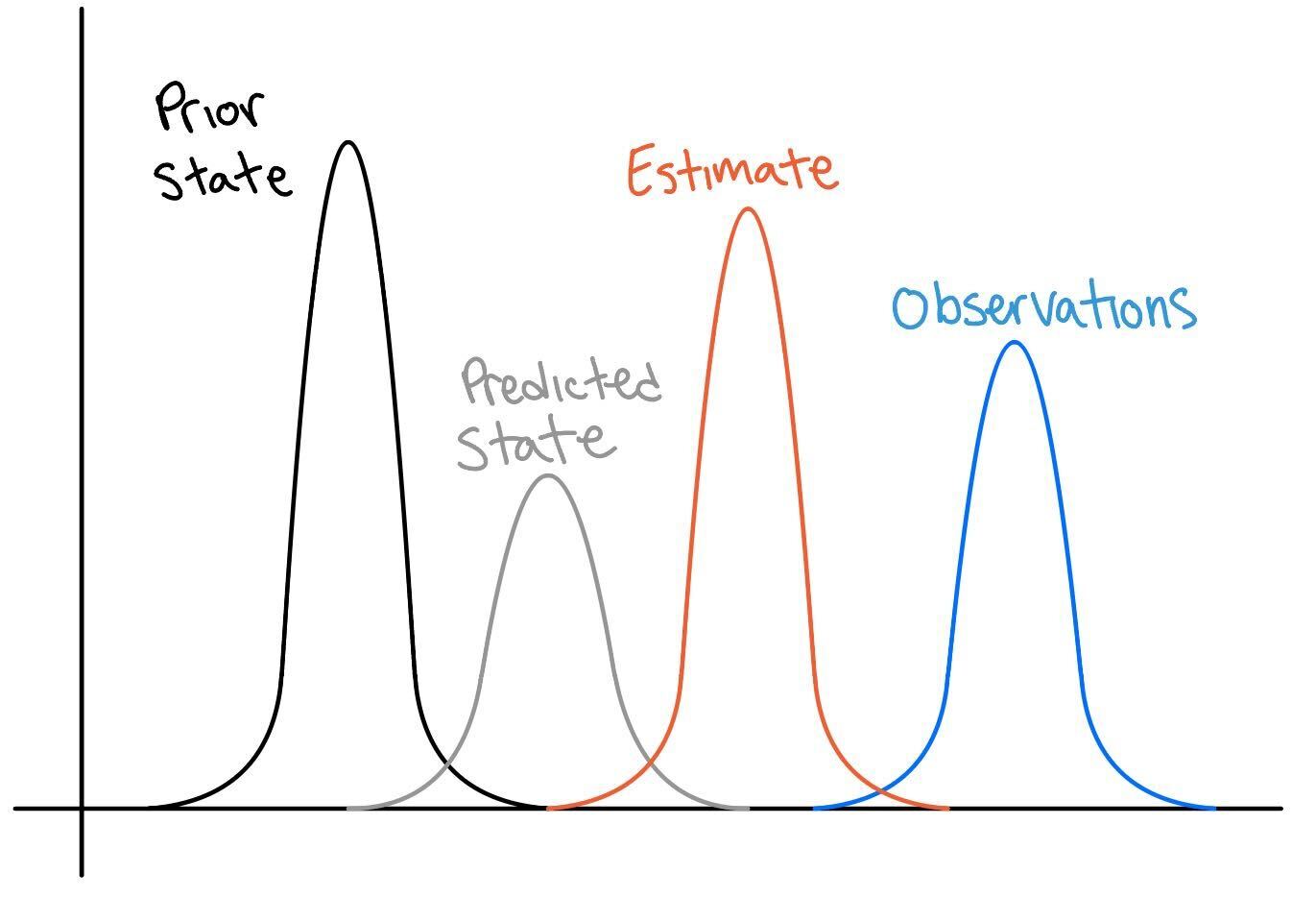
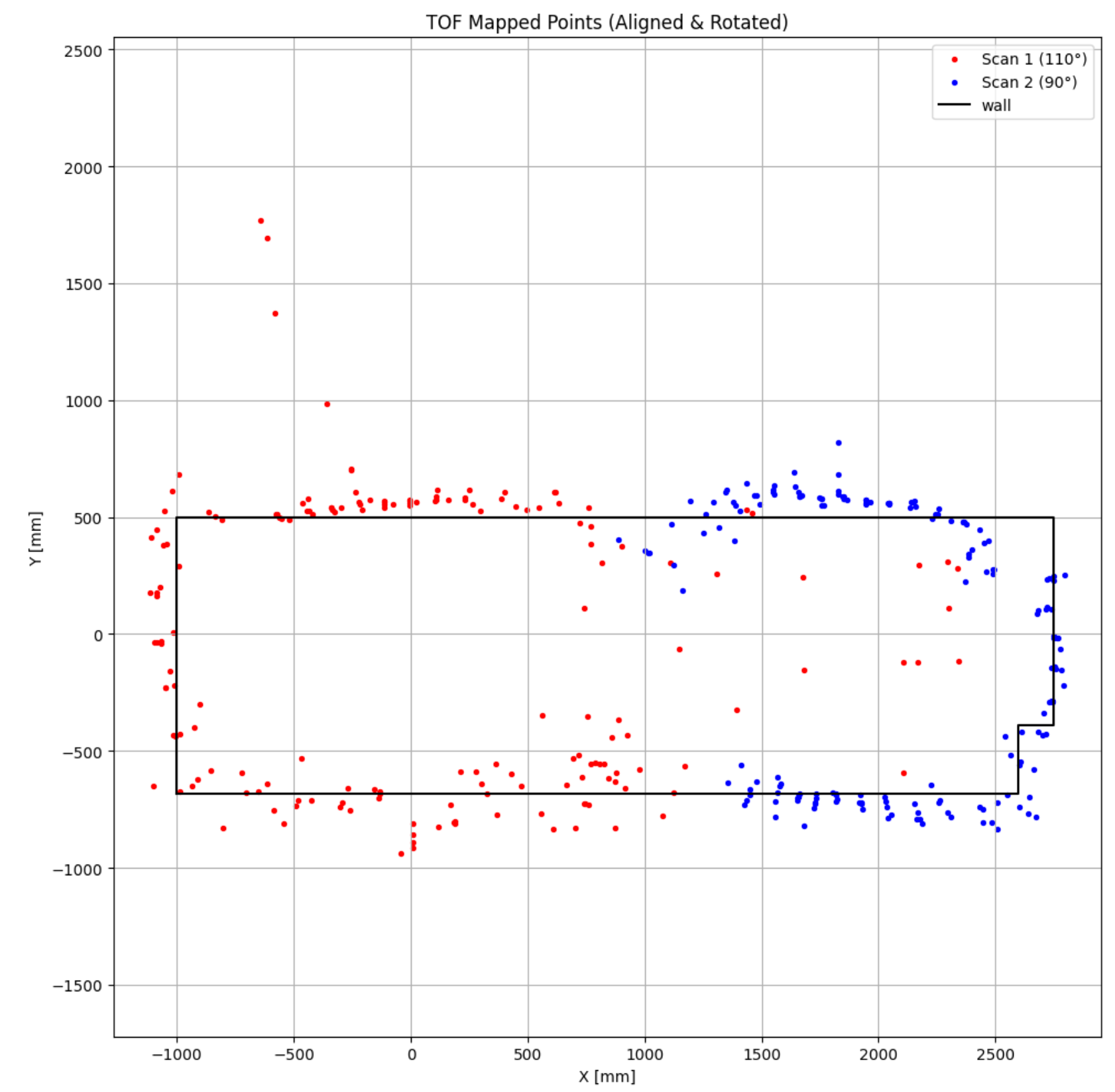
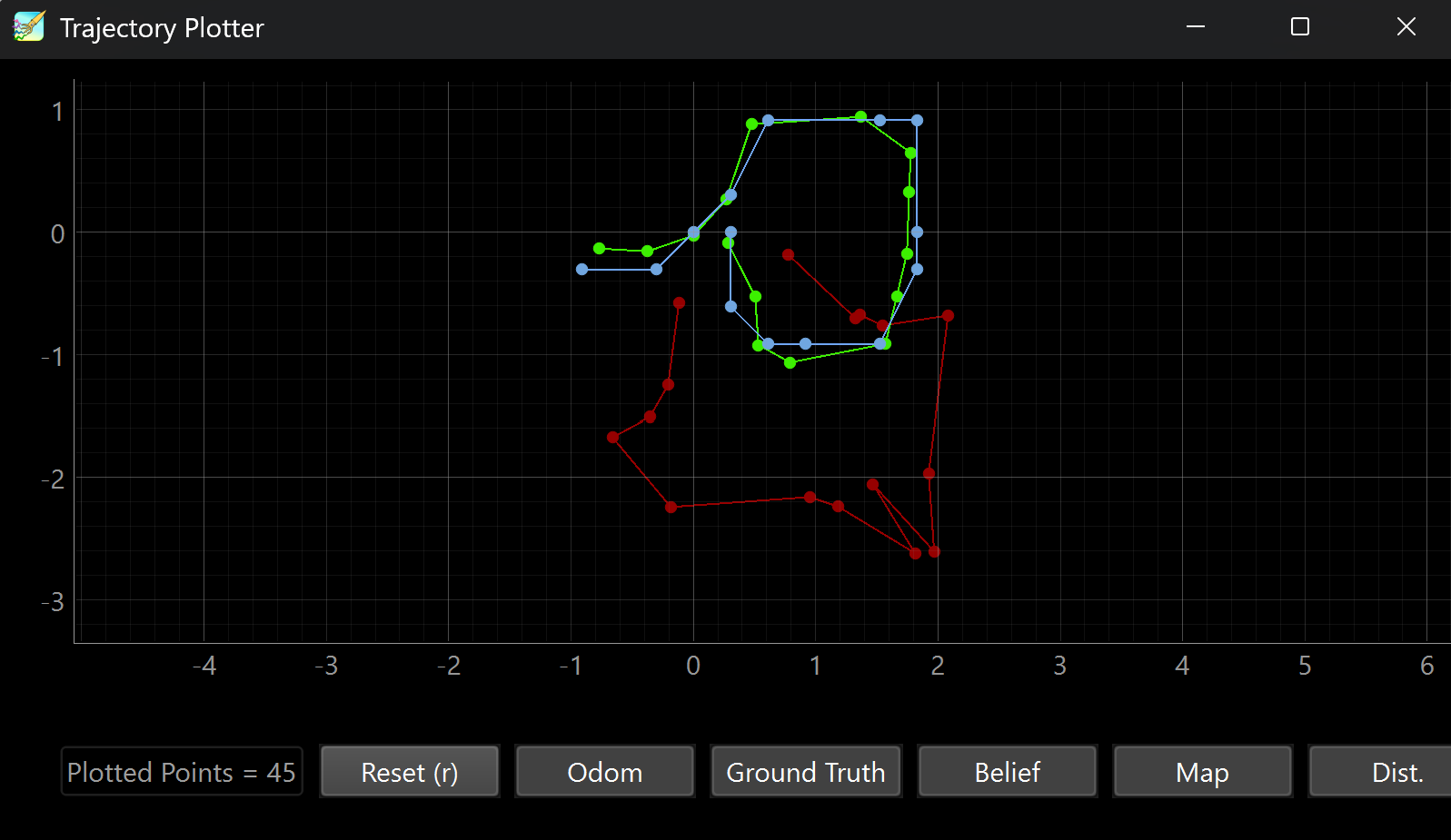
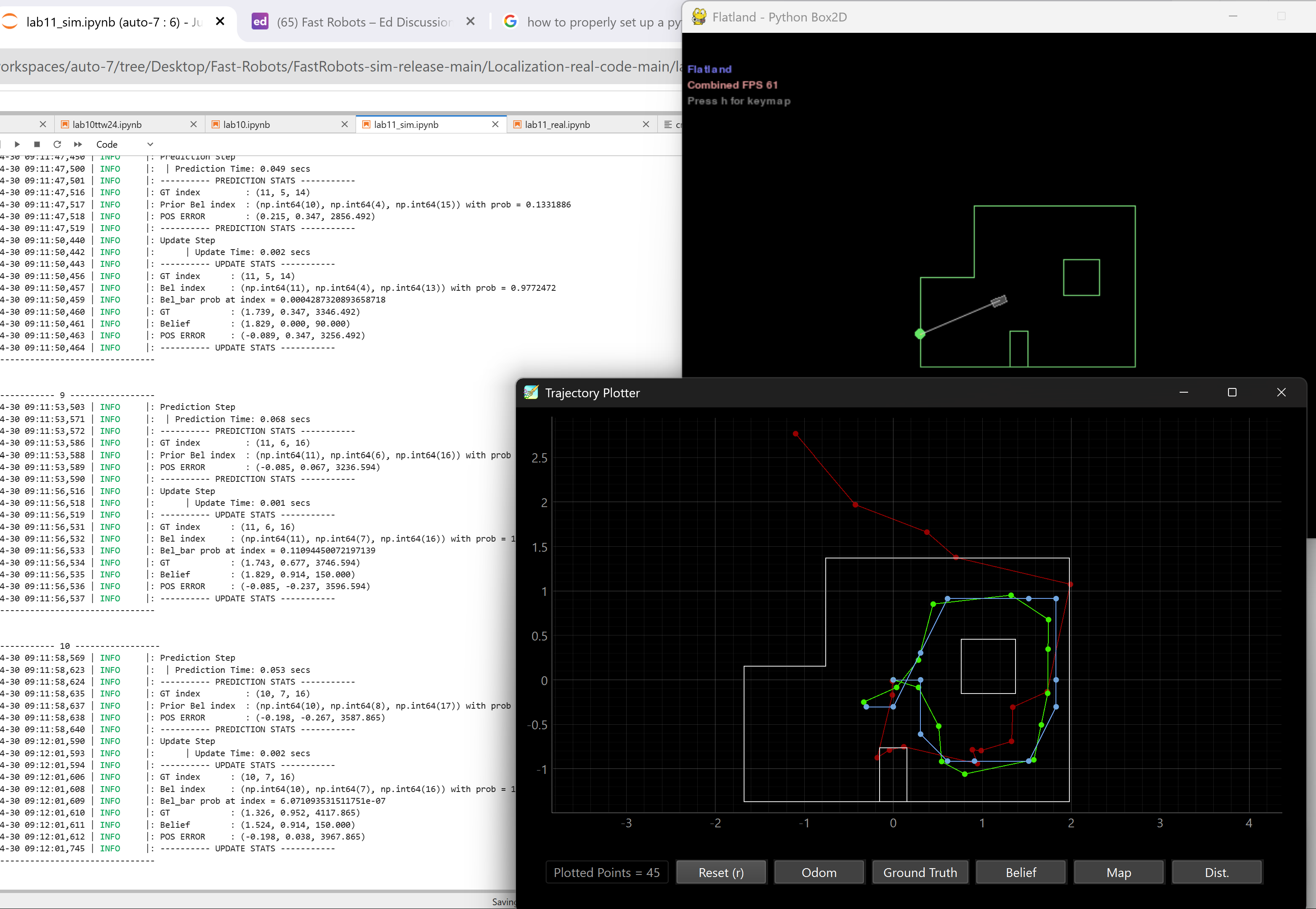
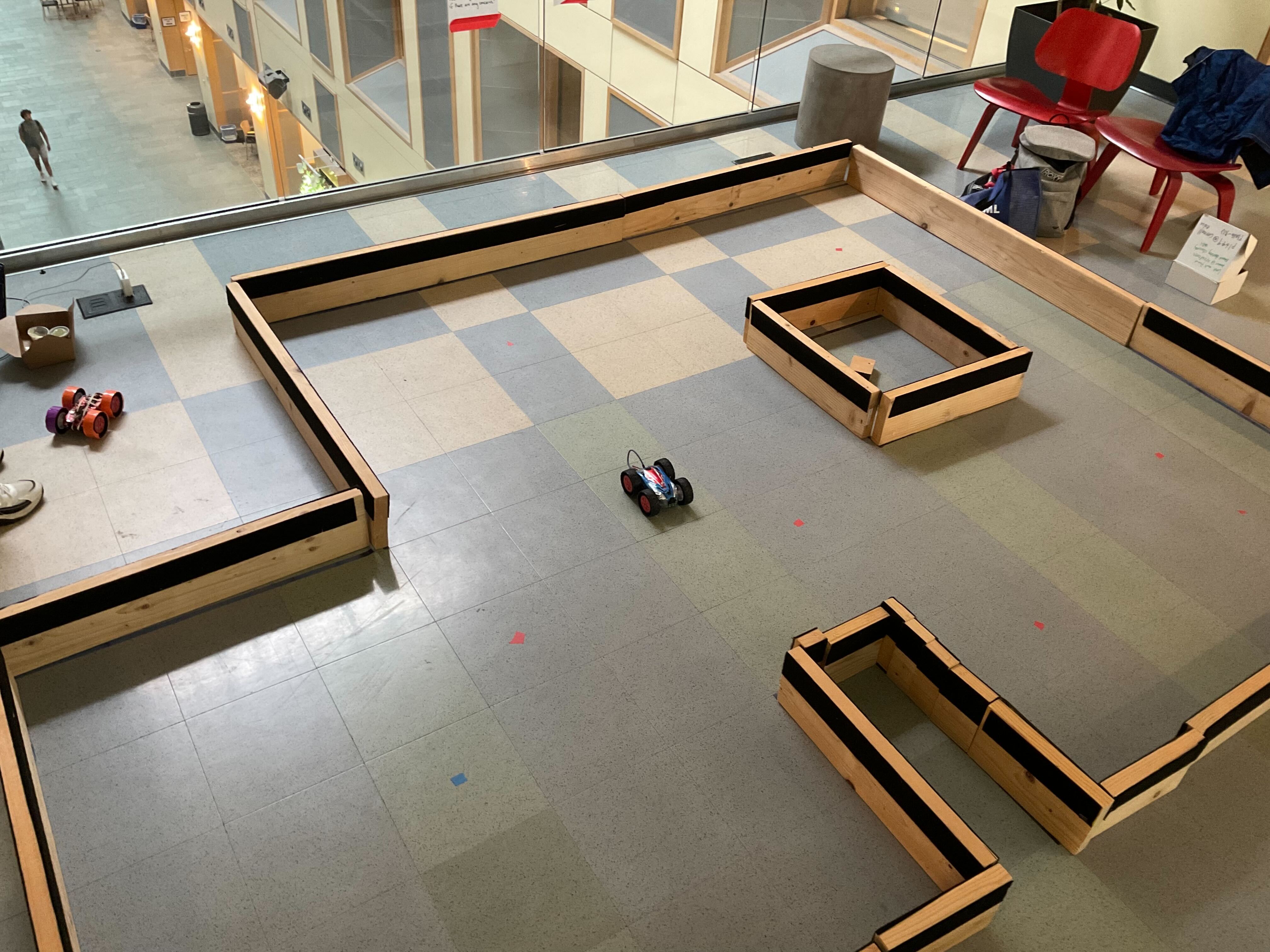
In MAE 5190: Fast Robots, I engineered a platform capable of mapping and navigating constrained environments at high speeds. Because the hardware constraints caused significant sensor latency, I couldn’t rely on raw data alone. I wrote the core navigation firmware in C, using a Kalman Filter to blend noisy Time-of-Flight ranges with snappy 9-DoF IMU data. This allowed the robot to maintain accurate localization even when the time of flight scans were lagging. I verified the system performance using Python to analyze run data and optimize the control algorithms.
Lab Reports